line functions More...
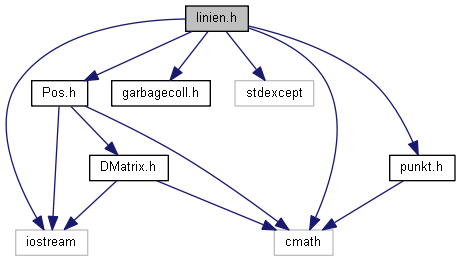
#include <iostream>#include <cmath>#include <garbagecoll.h>#include <stdexcept>#include <Pos.h>#include "punkt.h"
Include dependency graph for linien.h:
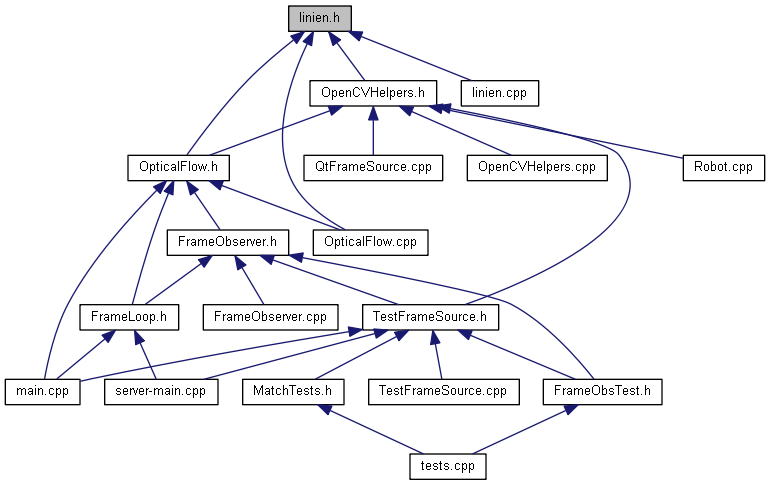
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PolLinie |
| a strait line in polar coordinates More... | |
| class | Linie |
| a strait line with polar coordinates and end points More... | |
Functions | |
| double | GetWinkelDiff (double w1, double w2) |
| difference of two angles in [-pi/2;pi/2] More... | |
| static std::ostream & | operator<< (std::ostream &o, const Linie &l) |
Detailed Description
line functions
Created in order to use cluster analysis for the vectorization of bitmap images during a machine vision practical.
Definition in file linien.h.
Function Documentation
| double GetWinkelDiff | ( | double | w1, |
| double | w2 | ||
| ) |
difference of two angles in [-pi/2;pi/2]
Definition at line 76 of file linien.cpp.
References M_PI.
Referenced by OpticalFlow::Particle::Found(), and OpticalFlow::PrintFlowField().
|
static |
Definition at line 48 of file linien.cpp.
References Linie::GetLinks(), Linie::GetOben(), Linie::GetRechts(), and Linie::GetUnten().